Un exosquelette pour protéger les seniors des chutes

© 2017 EPFL / Hillary Sanctuary
En première mondiale, une équipe de chercheurs de l’EPFL en Suisse et de la Scuola Sant’Anna en Italie ont développé un exosquelette intelligent qui sait détecter et déjouer les chutes. Il a été testé à l’Hôpital Fondazione Don Carlo Gnocchi à Florence.
Les combinaisons robotiques qui perfectionnent nos mouvements et nous rendent plus endurants n’appartiennent plus désormais aux seuls récits de science-fiction. Elles sont d’ores et déjà en développement et, dans l’environnement contrôlé d’un laboratoire, arrivent même à protéger les personnes âgées contre les chutes.
Des chercheurs de la Scuola Sant’Anna en Italie et de l’EPFL (École Polytechnique Fédérale de Lausanne) en Suisse ont mis au point un prototype d’exosquelette intelligent, léger, et adaptable qui permet de déjouer les pertes d’équilibre. La prévention d’un évènement inattendu tel qu’une chute représente une application inédite en matière de combinaisons robotiques, qui visent traditionnellement à assister et améliorer les mouvements normaux. Les résultats des tests sont publiés dans la revue Scientific Reports du 11 mai.
Conçu en premier lieu pour les seniors, qui sont impliqués dans 40% des blessures fatales liées aux chutes en Europe, l’exosquelette pourrait aussi aider des personnes handicapées, amputées, ou souffrant de désordres neurologiques. Cette technologie permettrait d’améliorer la vie quotidienne des personnes à risque.
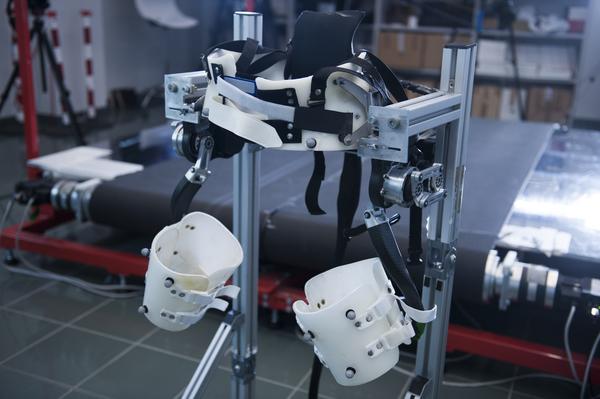
L’exosquelette est léger et se porte à la façon d’un pantalon, des pieds à la taille, bien loin des grosses armures métalliques de films de science-fiction.
« Notre exosquelette intelligent est léger et très facile à individualiser », explique Silvestro Micera, professeur à l’EPFL et à la Scuola Sant’Anna, et qui tient la Chaire Fondation Bertarelli en neuroingénierie translationnelle. Il suffit de quelques minutes pour adapter le prototype à un nouveau patient et apprendre les caractéristiques de sa démarche.
Comment fonctionne l’exosquelette
A l’Hôpital Fondazione Don Carlo Gnocchi à Florence, Fulvio Bertelli, 69 ans, enfile la combinaison robotique. L’appareil est composé d’armatures en fibres de carbone et de moteurs placés au niveau des hanches. Quelques vis à ajuster, et voilà Fulvio Bertelli prêt à tester l’exosquelette en laboratoire. Le dispositif est efficace.
« Je me sens plus sûr de moi quand je porte l’exosquelette » explique Fulvio Bertelli après avoir testé l’appareil sur un tapis roulant spécialement conçu pour provoquer des pertes l’équilibre et engendrer des chutes.
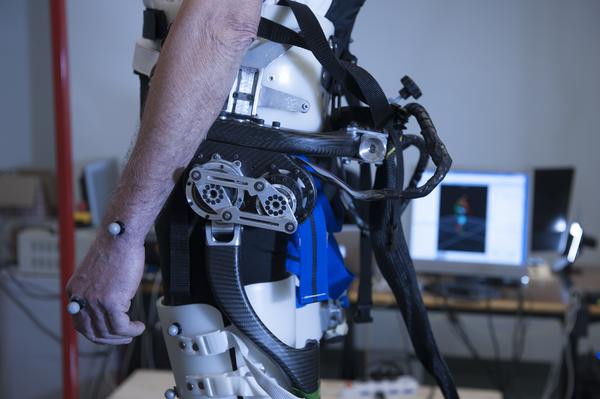
L’exosquelette personnalisé détecte d’abord les particularités de la marche de Fulvio Bertelli : la configuration de sa foulée, c’est-à-dire sa démarche. Une fois cette configuration établie, l’algorithme du système est capable de détecter une déviation, ce qui indique un déséquilibre. Dès que l’anomalie est détectée, les moteurs des hanches entrent en jeu, poussent sur les cuisses pour tendre la jambe et ainsi rétablir la stabilité.
Des neuroprothèses aux exosquelettes
« J’ai eu la chance de pouvoir travailler avec Nicola Vitiello, professeur à la Scuola Sant’Anna et expert du développement des exosquelettes, et avec Vito Monaco, également de la Scuola Sant’Anna et expert en biomécaniques de la locomotion », explique Silvestro Micera. « Ensemble nous avons eu l’idée de développer cet exosquelette pour prévenir les chutes. »
Silvestro Micera met au point des prothèses qui permettent aux amputés de retrouver des sensations. Son intérêt pour les exosquelettes est né il y a plusieurs années lors d’une conférence sur la robotique. Il y a vu le tout premier dispositif conçu pour restaurer les fonctions motrices des membres inférieurs, et a été impressionné par les possibilités qu’offrent ces appareils aux personnes à mobilité réduite.
La prochaine phase de développement sera d’assurer que le système soit le moins gênant possible et n’entrave pas les mouvements normaux, surtout lorsque l’utilisateur n’est pas sur le point de tomber. L’équipe cherche désormais à adapter l’exosquelette au monde extérieur en le rendant plus discret et plus confortable, ainsi qu’à le tester en situations réelles.
Relation humain/robot: passer de la biomécanique à la symbiose
Le défi principal des chercheurs chargés de concevoir des dispositifs robotiques portables est la grande variabilité du comportement humain. C’est pourquoi Vito Monaco souhaite généraliser l’idée, sous-jacente à cette étude, de promouvoir le développement de solutions innovantes permettant aux humains et aux robots d’œuvrer ensemble en tant qu’entités uniques et harmonieuses.
«Notre étude démontre qu’une telle plateforme robotique peut interagir efficacement avec l’être humain qui la porte lors d’événements nécessitant une réponse motorisée réactive, comme une perte d’équilibre accidentelle par exemple. Ces résultats ouvrent de nouvelles perspectives pour le développement de systèmes robotiques destinés à améliorer les capacités humaines au quotidien», explique Vito Monaco.
Exosquelettes et société
"Ce travail ouvre la voie à une nouvelle génération d'exosquelettes qui sera réellement efficace dans la vie courante grâce à leur capacité à augmenter le mouvement des utilisateurs et à rendre leur mobilité plus stable et sûre", explique Nicola Vitiello. Le chercheur est certain que les robots endossables représenteront la prochaine vague de technologies de l'information et de la communication. Ils assisteront la société et apporteront leur aide dans des domaines aussi variés que la santé ou l'industrie. "Pour atteindre ces objectifs, les exosquelettes doivent être dotés de fonctionnalités qui s’adaptent à l’environnement dans lequel ils sont utilisés."
Cette recherche a obtenu le soutien de la commission européenne FP7 du projet CYBERLEGs (The CYBERnetic LowEr-Limb CoGnitive Orthoprosthesis, Grant Agreement no. 287894), et du projet H2020 CYBERLEGs Plus Plus (The CYBERnetic LowEr-Limb CoGnitive Ortho-prosthesis Plus Plus, Grant Agreement no. 731931), la fondation privée “Fondanzione Pisa” du projet IUVO (“The wearable cognitive robot for the functional assistance of lower-limb motion”), le ministère italien d'enseignement et de recherche (MIUR) du projet national PRIN “A quantitative and multi factorial approach for estimation and preventing the risk of falls in the elderly people”, la fondation Bertarelli, NCCR Robotics, et les fonds institutionnels du BioRobotics Institute, Scuola Superiore Sant’Anna, et IRCCS la fondation Don Carlo Gnocchi.